Platinum Maestro运动控制器 —— 运动程序笔记
本文共 1513 字,大约阅读时间需要 5 分钟。
说明
留坑待填
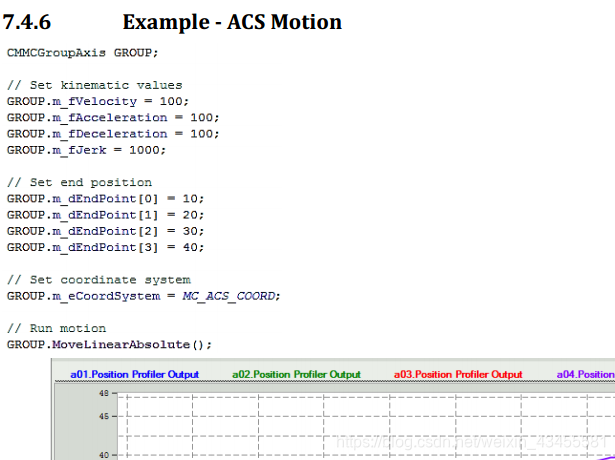
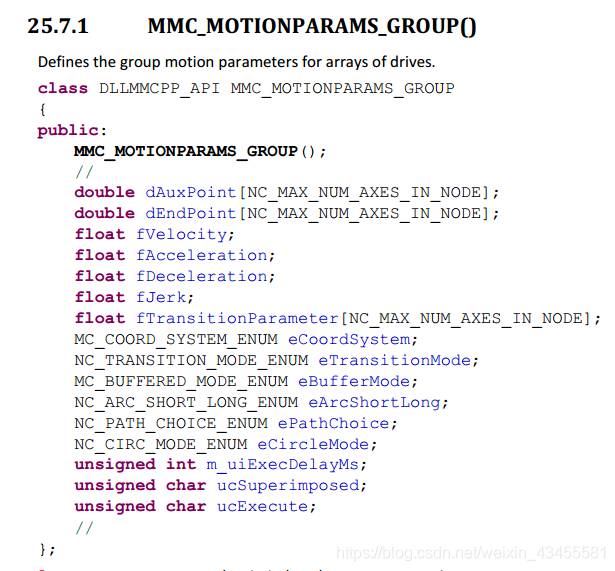
class DLLMMCPP_API MMC_MOTIONPARAMS_GROUP{public: MMC_MOTIONPARAMS_GROUP(); // double dAuxPoint[NC_MAX_NUM_AXES_IN_NODE]; //rray [1 . .N]为输入信号CoordSystem指定的坐标系中每个维度的绝对位置,N为供应商特定。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量.dAuxPoint可以有向量数组[1…3]技术单位的两倍值[u]。[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 double dEndPoint[NC_MAX_NUM_AXES_IN_NODE]; //Array [1 . .N]为输入信号CoordSystem指定的坐标系中每个维度的绝对端点位置,N为供应商特定。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量。dEndPoint是技术单元[u]中的二维或三维双向量数组。[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 float fVelocity;//定义路径的最大速度(不一定达到)的值。u/s中的任何正值 float fAcceleration;//加速度,u/s^2 float fDeceleration;//负加速度,u/s^2 float fJerk;//加加速度,/s^3 float fTransitionParameter[NC_MAX_NUM_AXES_IN_NODE]; //根据过渡模式的不同,可以使用不同的供应商特定的过渡参数来表征轮廓曲线。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量。根据TransitionMode参数,fTransitionParameter可以在适当的单元中有任何正的浮点值。参考截面坐标系和运动学变换.[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 MC_COORD_SYSTEM_ENUM eCoordSystem; //定义支持的坐标系统的类型。 NC_TRANSITION_MODE_ENUM eTransitionMode; //定义受支持的NC_TRANSITION_MODE_ENUM枚举器转换模式。参考下面的多轴运动控制—转换和缓冲模式和选项。------P1973 MC_BUFFERED_MODE_ENUM eBufferMode; //MC_BUFFERED_MODE_ENUM枚举器定义了轴的行为。 NC_ARC_SHORT_LONG_ENUM eArcShortLong; //定义支持的弧长类型 NC_PATH_CHOICE_ENUM ePathChoice; //定义所支持路径选择的NC_PATH_CHOICE_ENUM枚举器类型。 NC_CIRC_MODE_ENUM eCircleMode; //在2D中定义受支持的循环模式的类型。参考节坐标系统和运动学变换。 unsigned int m_uiExecDelayMs; //执行下一个动作的延迟(以秒为单位)。任意+ve整数值。 unsigned char ucSuperimposed; //是否操作了叠加选项。接受的值是布尔值真/假。 unsigned char ucExecute;//从上升边缘启动执行命令。布尔真/假值 //}; 转载地址:http://ffzxf.baihongyu.com/
你可能感兴趣的文章
volatile关键字
查看>>
Request_继承体系
查看>>
前端权限控制:获取用户信息接口构造数据
查看>>
七牛云存储:断点续传
查看>>
ubuntu opencv-python 安装很慢问题
查看>>
MySQL5.7版本修改了my.ini配置文件后mysql服务无法启动问题
查看>>
Exception in thread “main“ java.sql.SQLException错误之一: Column Index out of range, 0 < 1.
查看>>
机器学习之重头戏-特征预处理
查看>>
synchronized底层实现及锁的升级、降级
查看>>
PermGen space-永久区内存溢出
查看>>
Apache Kafka:优化部署的 10 种最佳实践
查看>>
Leetcode 35. 搜索插入位置 c#
查看>>
[12] JMeter-结果分析之图形图表
查看>>
Java数组详解
查看>>
vs中动态DLL与静态LIB工程中加入版本信息的方法
查看>>
自定义Starter
查看>>
映 射 ALT 键
查看>>
vim使用快捷键F4生成文件头注释、F5生成main函数模板、F6生成.h文件框架模板
查看>>
SERVICE_UNAVAILABLE/1/state not recovered / initialized
查看>>
crontab定时任务写法
查看>>